

|
新聞主題 |
發(fā)電機(jī)失磁后的機(jī)端測量阻抗公式與相量圖 |
摘要:失磁保護(hù)用于保護(hù)失勵或低勵引起的發(fā)電機(jī)異常,發(fā)電機(jī)失磁后,將過渡到異步運行,轉(zhuǎn)子出現(xiàn)轉(zhuǎn)差,定子電流增大,電壓下降,有功功率下降,反向無功功率增加(從系統(tǒng)中吸收無功增加),引起系統(tǒng)電壓下降。失磁后,發(fā)電機(jī)機(jī)端測量阻抗發(fā)生變化。本文詳細(xì)探討了發(fā)電機(jī)失磁后機(jī)端測量阻抗的變化軌跡和特征,并介紹了如何采取合理措施解決失磁問題,提高發(fā)電機(jī)的穩(wěn)定性和可靠性。希望讀者在實際應(yīng)用中能夠更好地理解和應(yīng)用相關(guān)知識。
一、失磁對發(fā)電機(jī)阻抗的影響
發(fā)電機(jī)失磁是指磁場在一定情況下消失或減弱,從而使發(fā)電機(jī)不能正常發(fā)電。在失磁情況下,發(fā)電機(jī)的電氣參數(shù)會發(fā)生變化,從而導(dǎo)致阻抗發(fā)生變化。具體表現(xiàn)為:
1、阻抗模值減小
失磁后,發(fā)電機(jī)定子中的電流會出現(xiàn)較大波動,導(dǎo)致發(fā)電機(jī)的感應(yīng)電動勢變化較大,從而使發(fā)電機(jī)的恒定值阻抗模值減小。
2. 阻抗相位角變化
失磁后,發(fā)電機(jī)的電氣參數(shù)變化,導(dǎo)致阻抗相位角發(fā)生變化。
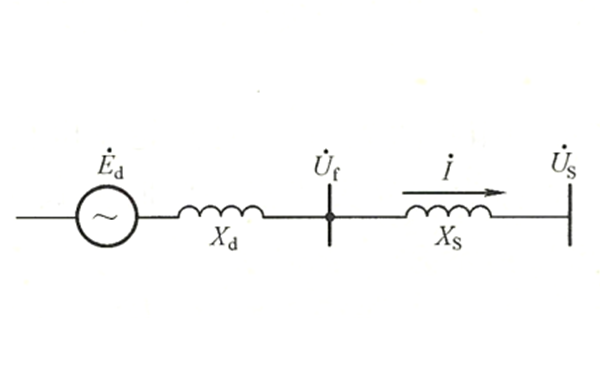
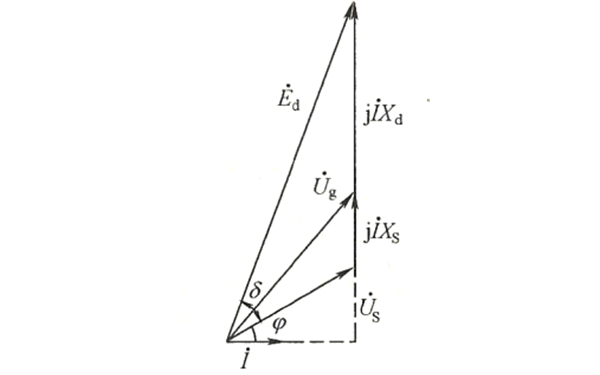
發(fā)電機(jī)與無窮大系統(tǒng)并列運行等值電路和相量圖分別如圖1、圖2所示。圖中?d為發(fā)電機(jī)的同步電動勢;Úg為發(fā)電機(jī)端的相電壓;Ús為無窮大系統(tǒng)的相電壓;?為發(fā)電機(jī)的定子電流;Xd為發(fā)電機(jī)的同步電抗;Xs為發(fā)電機(jī)與系統(tǒng)之間的聯(lián)系電抗,XΣ=Xd+Xs;φ為受端的功率因數(shù)角;δ為?d和Ús之間的夾角(即功角)。根據(jù)電機(jī)學(xué)知識,發(fā)電機(jī)送到受端的功率S=P-jQ(規(guī)定發(fā)電機(jī)送出感性無功功率時表示為P-jQ)分別為

在正常運行時,δ<90°;一般當(dāng)不考慮勵磁調(diào)節(jié)器的影響時,δ=90°為穩(wěn)定運行的極限;δ>90°后發(fā)電機(jī)失步。
|
圖1 發(fā)電機(jī)并聯(lián)運行等值電路圖 |
圖2 發(fā)電機(jī)并聯(lián)運行等值相量圖 |
二、失磁后機(jī)端測量阻抗
發(fā)電機(jī)從失磁開始到進(jìn)入穩(wěn)態(tài)異步運行,一般可分為以下三個階段。
1、失磁后到失步前(等有功圓)
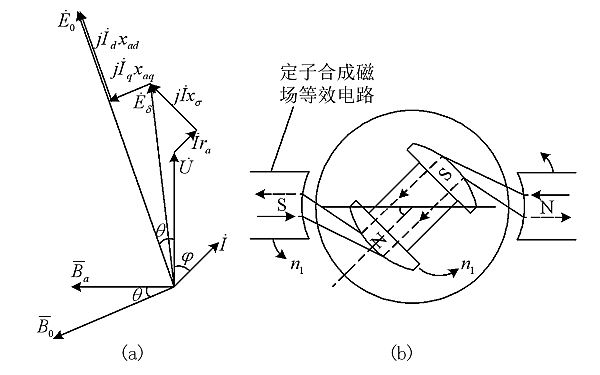
在此階段中,轉(zhuǎn)子電流逐漸減小,發(fā)電機(jī)的電磁功率P開始減小,由于柴油機(jī)所供給的機(jī)械功率還來不及減小,于是轉(zhuǎn)子逐漸加速,使?d和Ús之間的功角δ隨之增大,P又要回升。在這一階段中,sinδ的增大與E。的減小相互補償,基本上保持了電磁功率P不變。與此同時,無功功率Q將隨著?d的減小和δ的增大而迅速減小,按式(2-33)計算的Q值將由正變?yōu)樨?fù),即發(fā)電機(jī)變?yōu)槲崭行缘臒o功功率。功率角如圖3所示。
在這一階段中,發(fā)電機(jī)端的測量阻抗為
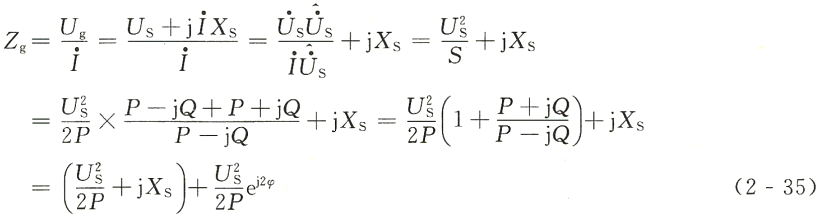
如上所述,式(2-35)中的Us、Xs和P為常數(shù),而Q和φ為變數(shù),因此它是一個圓的方程式,表示在復(fù)阻抗平面上如圖4所示。
|
圖3 發(fā)電機(jī)功率角的意義 |
圖4 發(fā)電機(jī)等有功阻抗圓 |
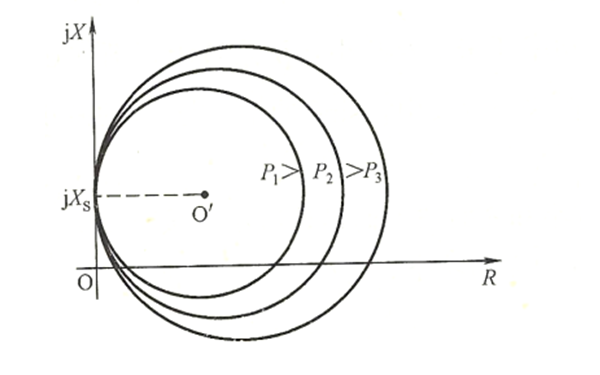
其圓心O‘的坐標(biāo)公式為
U2S/2P,XS
半徑公式為
U2S/2P
由于這個圓是在有功功率P不變的條件下作出的,因此稱為等有功阻抗圓。由式(2-34)可見,機(jī)端測量阻抗的軌跡與P有密切關(guān)系,對應(yīng)不同的P值有不同的阻抗圓,且P越大時圓的直徑越小。發(fā)電機(jī)失磁以前,向系統(tǒng)送出無功功率,φ角為正,測量阻抗位于第一象限,失磁以后隨著無功功率的變化,φ角由正值變?yōu)樨?fù)值,因此測量阻抗也沿著圓周隨之由第一象限過渡到第四象限。
2、臨界失步點(靜穩(wěn)阻抗邊界圓)
對柴油發(fā)電機(jī)組,當(dāng)δ=90°時,發(fā)電機(jī)處于失去靜態(tài)穩(wěn)定的臨界狀態(tài),故稱為臨界失步點。此時由式(2-34)可得輸送到受端的無功功率為

式(2-36)中Q為負(fù)值,表明臨界失步時,發(fā)電機(jī)自系統(tǒng)吸收無功功率,且為一常數(shù),故臨界失步點也稱為等無功點。此時機(jī)端的測量阻抗為

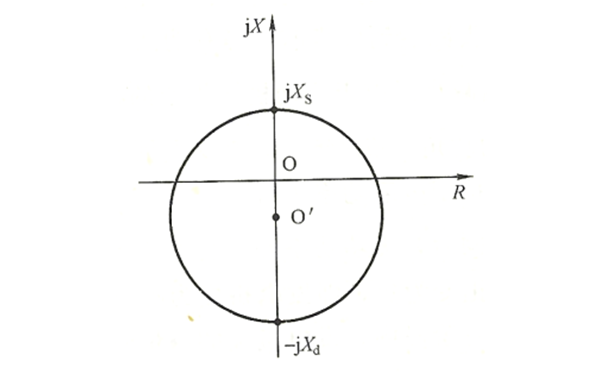
由式(2-37)可知,發(fā)電機(jī)在輸出不同的有功功率P而臨界失穩(wěn)時,其無功功率Q恒為常數(shù)。φ為變量,也是一個圓的方程,為以jXS和一jXd兩點連線為直徑的圓,如圖4所示。
其圓心O‘的坐標(biāo)為
![]()
半徑為
Xd-Xs/2
這個圓稱為臨界失步圓也稱靜穩(wěn)阻抗圓或等無功圓。其圓周為發(fā)電機(jī)以不同的有功功率P而臨界失穩(wěn)時,機(jī)端測量阻抗的軌跡,圓內(nèi)為靜穩(wěn)破壞區(qū)。
3、靜穩(wěn)破壞后的異步運行階段(異步阻抗圓)
靜穩(wěn)破壞后的異步運行階段可用的等值電路來表示,按圖1所示的電流正方向,機(jī)端測量阻抗應(yīng)為

當(dāng)發(fā)電機(jī)空載運行失磁時,轉(zhuǎn)差率s≈0,R2/s≈∞,此時機(jī)端測量阻抗為最大,即
![]()
當(dāng)發(fā)電機(jī)在其他運行方式下失磁時,Zg將隨轉(zhuǎn)差率增大而減小,并位于第四象限。極限情況是當(dāng)fg→∞時,s→-∞,R2/s→0,Zg的數(shù)值為最小。此時,有
![]()
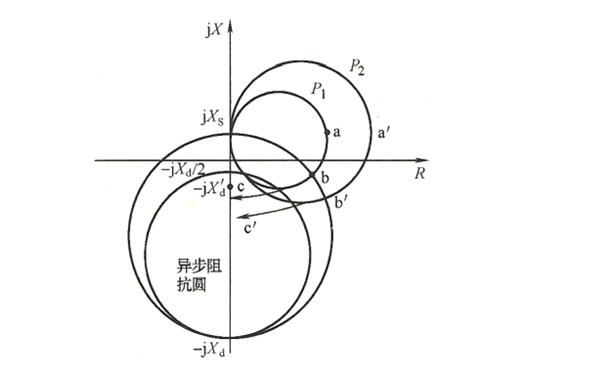
綜上所述,發(fā)電機(jī)失磁前在過激狀態(tài)下運行時,其機(jī)端測量阻抗位于第一象限(見圖5中的a或a'點),失磁以后,測量阻抗沿等有功圓向第四象限移動。
當(dāng)它與靜穩(wěn)阻抗圓(等無功阻抗圓)相交時(b或b'點),表示機(jī)組運行處于靜穩(wěn)定的極限。越過b(或b')點以后,轉(zhuǎn)入異步運行,最后穩(wěn)定運行于c(或c')點,此時平均異步功率與調(diào)節(jié)后的柴油機(jī)輸入功率相平衡。
異步邊界阻抗特性圓是以一jX/2和一jX。兩點連線為直徑的圓,如圖5所示,進(jìn)入圓內(nèi)表明發(fā)電機(jī)已進(jìn)入異步運行。異步邊界阻抗圓小于靜穩(wěn)極限阻抗圓,完全落在第三、四象限。所以在同一工況的系統(tǒng)中運行,若失磁保護(hù)采用靜穩(wěn)極限阻抗元件,在失磁故障時一定比采用異步邊界阻抗元件動作得更早。由于異步邊界阻抗特性圓沒有一、二象限的動作區(qū),采用異步邊界阻抗元件有利于減少非失磁故障時的誤動幾率。
|
圖5 臨界失步阻抗圓 |
圖6 發(fā)電機(jī)失磁后機(jī)端測量阻抗的變化軌跡圖示 |
三、其他運行方式的機(jī)端測量阻抗
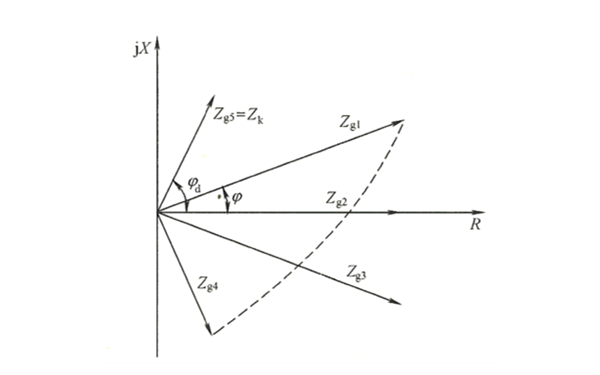
為了便于和失磁情況下的機(jī)端測量阻抗(見圖6中的Zg4)進(jìn)行鑒別和比較,現(xiàn)對發(fā)電機(jī)在下列幾種運行情況下的機(jī)端測量阻抗進(jìn)行簡要說明。
1、發(fā)電機(jī)正常運行時的機(jī)端測量阻抗
當(dāng)發(fā)電機(jī)向外輸送有功功率和無功功率時,其機(jī)端測量阻抗Zg位于第一象限,如圖6中的Zg1,它與R軸的夾角φ為發(fā)電機(jī)運行時的功率因數(shù)角。當(dāng)發(fā)電機(jī)只輸出有功功率時,測量阻抗Zg2位于R軸上。當(dāng)發(fā)電機(jī)欠激運行時,向外輸送有功功率,同時從電力系統(tǒng)吸收一部分無功功率(Q值變?yōu)樨?fù)),但仍保持同步并列運行,此時,測量阻抗Zg3位于第四象限。
2、發(fā)電機(jī)外部故障時的機(jī)端測量阻抗
當(dāng)采用0°接線方式時,故障相測量阻抗位于第一象限,其大小和相位正比于短路點到保護(hù)安裝地點之間的阻抗Zk,如圖6中的Zg5。如繼電器接于非故障相,則測量阻抗的大小和相位需經(jīng)具體分析后確定。
3、發(fā)電機(jī)與系統(tǒng)間發(fā)生振蕩時的機(jī)端測量阻抗
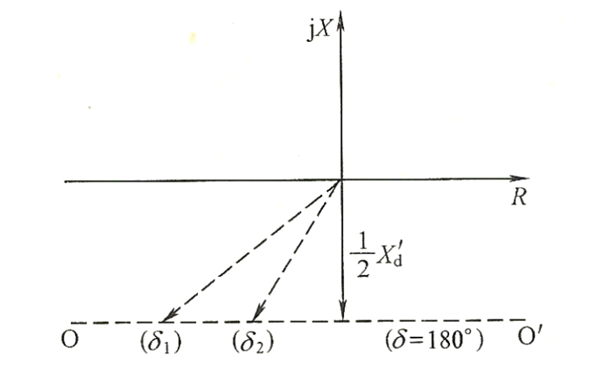
根據(jù)圖2-30所示系統(tǒng)振蕩時機(jī)端測量阻抗的變化及其對保護(hù)影響的分析,當(dāng)假定機(jī)端母線為無限大母線,即認(rèn)為Ed=US時,振蕩中心位于½ⅹΣ處。當(dāng)XS≈0時,振蕩中心即位于 ½ⅹ’d處,此時機(jī)端測量阻抗的軌跡沿直線OO'而變化,如圖7所示。當(dāng)δ=180°時,測量阻抗的最小值。系統(tǒng)發(fā)生振蕩時,即使XS≈0,振蕩阻抗軌跡均不會進(jìn)入異步邊界阻抗圓,采用異步邊界阻抗判據(jù)的失磁保護(hù)不可能誤動。
4、發(fā)電機(jī)自同步并列時的機(jī)端測量阻抗
在發(fā)電機(jī)接近于額定轉(zhuǎn)速,不加勵磁而投入斷路器的瞬間,與發(fā)電機(jī)空載運行時發(fā)生失磁的情況實質(zhì)是一樣的。但由于自同步并列的方式是在斷路器投入后立即給發(fā)電機(jī)加上勵磁,因此,發(fā)電機(jī)無勵磁運行的時間極短。對此情況,應(yīng)該采取措施防止失磁保護(hù)的誤動作。
|
圖6 發(fā)電機(jī)的機(jī)端測量阻抗圖示 |
發(fā)電機(jī)振蕩測量阻抗的變化軌跡圖示 |
----------------
以上信息來源于互聯(lián)網(wǎng)行業(yè)新聞,特此聲明!
若有違反相關(guān)法律或者侵犯版權(quán),請通知我們!
溫馨提示:未經(jīng)我方許可,請勿隨意轉(zhuǎn)載信息!
如果希望了解更多有關(guān)柴油發(fā)電機(jī)組技術(shù)數(shù)據(jù)與產(chǎn)品資料,請電話聯(lián)系銷售宣傳部門或訪問我們官網(wǎng):http://www.nkcyfdjpj.cn




