

|
新聞主題 |
發電機的自動勵磁調節器功能介紹 |
勵磁調節器是維持發電機的機端電壓恒定、通過合理的調差設置保證并列運行的機組間無功功率的合理分配,通過快速的勵磁響應提高電力系統的暫態穩定和靜態穩定。此外,調節器還具有故障錄波、事件記錄、系統自檢、智能調試等功能。
一、數字移相及觸發脈沖形成
數字移相就是將PID計算輸出的數字量Y轉換為控制角α,并在規定的角度區間內形成脈沖,經功率放大后形成觸發脈沖,給相應晶閘管觸發。對三相全控橋觸發脈沖,控制角α有上、下限,即αmin≤α≤αmax,如取αmin=5°、αmax=150°,并需采用雙脈沖觸發。
1.數字移相工作原理
數字移相就是將前述電壓控制信號Y對應的數字量D在規定的角度區間內轉換成時間tα,再由tα轉換為工頻電角度α,從而使數字移相。利用減法計數器在一定計數脈沖fc下對D作減計數運算,從計數開始到減計數器出現0為止的時間就是tα。顯然,tα等于D個計數脈沖周期,即

將式(6-33)中的延時轉換成對應的電角度,即控制角α,則有

式中 T1-交流電源的周期,對應角頻率ω1,工頻50Hz。
2.數字移相實現
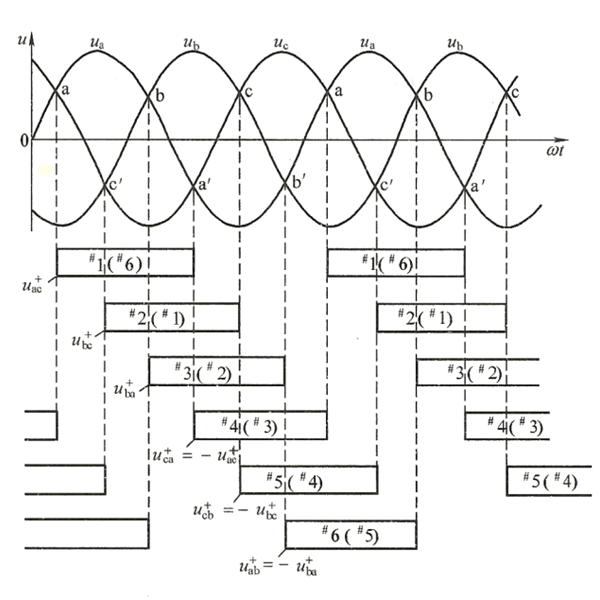
根據式(6-1)直流勵磁電壓Ud與延遲觸發角α之間關系,首先需確定延遲觸發角α的計算起始點,全控整流橋六個晶閘管依次相隔60°被觸發換相,對應有六個電源電壓為同步電壓,各同步電壓由負變正過零點的時刻即為a=0°的計算起始點。
在圖1中示出了VSO1~VSO6六個晶閘管同步電壓形成的區間,方框中標示有#1(#6)晶閘管觸發脈沖形成區間,對應同步電壓分別是uac、Ube、Uba、Uca、Ucb、Uab,各自正半周的起點即是α=0°起始點。方框中帶括弧的編號表示雙脈沖觸發時另一晶閘管的編號。當圖1中的方框開始出現時(即同步電壓正半周開始時),減計數器就對置入的數字量D開始進行減計數。
|
圖1 發電機同步去電壓形成的區間 |
數字移相觸發電路如圖2所示。uac、ube、uba經方波形成電路后,得到正半周高電位的方波電壓[u+ ac]、[u+ be]、[u+ ba],經反相器后分別得到uca、uca、ucb正半周高電位的方波電壓[u+ ca]、[u+ ca]、[u+ cb],這些高電位方波電壓就是晶閘管VSO1~VSO6的同步電壓。同步電壓作用于減計數器的“Gate”端,在時鐘脈沖fc作用下,減計數器對“D”端置入到計數器的數字量D作減法運算,當計數器為0時,輸出端“out”由高電位突變為低電位0V。“out”突變低電位時刻與控制角α對應,從而獲得了與控制角α相對應的低電位脈沖。
|
圖2 發電機數字移相觸發電路 |
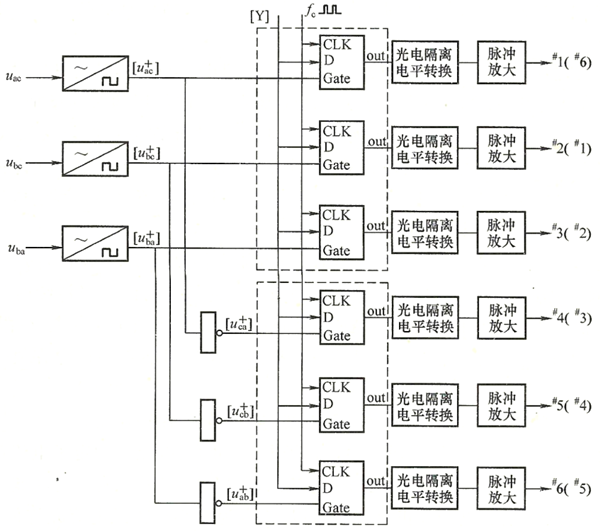
“out”的低電位脈沖經光電隔離、電平轉換,再經放大就可得到晶閘管的觸發脈沖。
在自并勵勵磁系統中,觸發脈沖要經脈沖變壓器放大后輸出,所以脈沖變壓器一、二次繞組間應有足夠高的隔離耐壓水平。自并勵勵磁系統電流大,可控整流柜一般為多個并聯,故觸發脈沖輸出數量要滿足要求,輸出功率要足夠大以保證晶閘管觸發導通。
由上述控制過程可知,輸入數字量從D減至0,經歷時間為tα,把延時tα換算成對應的適時觸發角α,計數脈沖個數D與α形成對應關系,見式(6-34),或寫成
![]()
【例6-2】某發電機勵磁電壓Ud=1000V,α=18°,計數脈沖頻率500kHz,交流電源50Hz。
求:
(1)數字控制量D;
(2)要求勵磁電壓Ud調至985V,數字控制量D′是多少?延遲觸發角α′是多少?解 由式(6-35)可求得數字控制量
![]()
因為Ud=1.35Ecosα,所以得

所以α′=20.48°
![]()
可取D′為569。
二、勵磁系統中的輔助控制
1.勵磁限制
大型同步發電機運行的安全性極為重要,繼電保護裝置是保證發電機安全的不可缺少的措施,AER的限制功能與繼電保護兩者的配合保證了發電機運行的安全。大型同步發電機上AER的限制功能有強勵反時限限制、過勵延時限制、欠勵瞬時限制、U/f限制、最大勵磁電流瞬時限制等。
(1)強勵反時限限制
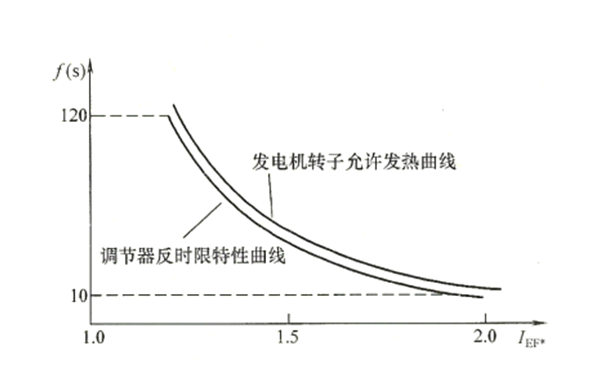
發電機勵磁繞組允許的勵磁電流與持續時間呈反時限制性,即勵磁電流愈大,允許作用的時間愈短;勵磁電流減小時,允許作用的時間增加。為使AER起到強勵反時限限制功能,應根據發電機勵磁繞組特性,將允許強勵倍數(如取2.0)、允許強勵時間(如10s)、稍低于強勵允許的反時限特性曲線輸入到AER中。允許強勵倍數和允許強勵時間的設置,實際上就限制了強勵允許反時限特性的峰值(最大強勵電壓、最短的允許時間)不超過發電機的允許限值。
電力系統發生短路故障時,發電機機端電壓可能大幅度降低,AER將發電機處強勵狀態。此時AER根據測到的勵磁電流,計算該勵磁電流的持續時間,當持續時間達到設置強勵反時限特性曲線相應允許時間時,AER停止強勵并將勵磁電流限定在限額值,見圖3。可見,AER的強勵反時限限制可使發電機勵磁繞組過熱不超過允許值,保證了發電機的安全。發電機勵磁繞組過負荷時,強勵反時限限制同樣可起到保護作用。
|
圖3 發電機反時限過勵磁限制特性曲線圖 |
(2)過勵延時限制
發電機在運行中,轉子電流(勵磁電流)和定子電流都不能長期超過額定值運行,圖4示出了發電機勵磁電流限制區域及定子電流限制區域。因發電機的空載電動勢Eq與轉子勵磁電流成正比,所以以M點為圓心、轉子電流允許值(如1.1IaN)相應的Eq為半徑的圓弧CD即為過勵延時限制線。發電機在運行中,AER不斷實時測量發電機的P、Q值,當Q值大于該點的允許值且持續時間達設定時間(如2min)時,過勵延時限制動作,減小發電機勵磁,將無功功率限制在設定曲線的無功功率值。
|
圖4 發電機靜態穩定性限制曲線圖 |
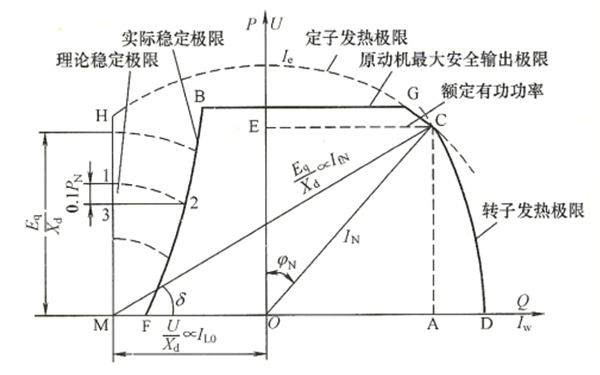
(3)欠勵瞬時限制。由于電力系統運行需要,同步發電機在運行中可能發生進相運行,即吸收感性無功功率和發出有功功率。由圖6-15所示的功角特性可見,在某一有功功率下,勵磁電流的減小意味著功率角增大,當δ角大于90°時發電機可能失去靜態穩定。為此,
AER中設有欠勵瞬時限制,當發電機進入設定的欠勵限制線時,AER瞬時欠勵限制動作,增大發電機勵磁,以保持發電機與系統的靜態穩定性,使發電機定子端部發熱在允許的范圍內。
隱極機的靜態穩定極限的理論值是δ=90°,因此,MH是理論上的靜態穩定運行邊界。在突然過負荷時,為了維持發電機的穩定運行,實際的靜態穩定運行邊界應留有一定的余量。圖6-39中BF曲線是考慮了能承受0.1PN過負荷能力的實際靜穩定極限。曲線BF是這樣作出來的:先在理論邊界上取一些點(如點1),然后保持勵磁電流(Eq/Xd)不變,作圓弧12,再找出實際功率比理論功率低0.1PN的點的集合直線23,曲線12和直線23的交點就在實際穩定極限上。用同樣的方法將能找到實際穩定極限的所有的點,連接這些點可得實際穩定極限的邊界。
(4)電壓/頻率(U/f)限制
發電機的端電壓的計算公式為
U=4.44fBN×10-8 (6-36)
式中 B——磁感應強度;
f ——系統頻率;
N——繞組匝數;
S ——每極有效截面積。
式(6-36)中,4.44NS為常數,設為系數K,則有

設額定運行時(對應UN、fx)的磁感應強度為BN,則有

式(6-38)中U*、f*為電壓、頻率的標幺值。測量n值大小就可判定發電機過勵磁的程度。
當發電機電壓升高或系統頻率降低時,發電機過勵磁,n增大,表現為鐵芯飽和,勵磁電流急劇增大,渦流損耗增大;諧波磁場增強,使附加損耗加大,引起局部發熱;同時定子鐵芯背部漏磁場增強,在定位筋附近引起局部過熱,過熱程度隨n值增大急劇增加。防止發電機及變壓器由于電壓過高或頻率過低而鐵芯過熱,采取對電壓與頻率比值進行限制。
AER中的過勵磁限制可起到發電機過勵磁保護作用,當然過勵磁限制值應與發電機過勵磁保護動作值相配合。應當指出,水輪發電機突然甩負荷時(如線路故障跳閘),因調速系統關閉導水葉有較大的慣性,所以轉速急劇上升,導致機端電壓升高,危及定子絕緣。在這種情況下過電壓限制可抑制機端電壓的迅速上升。
(5)最大勵磁電流瞬時限制
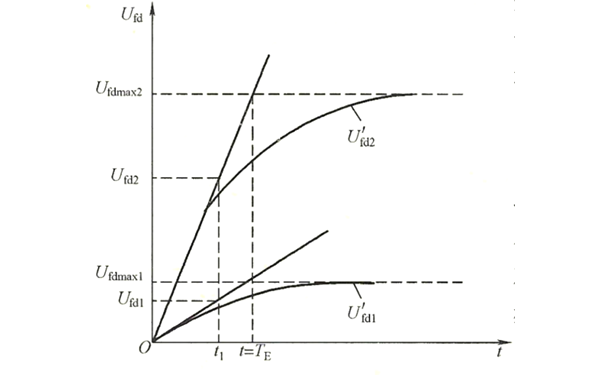
電力系統穩定要求發電機勵磁系統有高的電壓上升速度。交流勵磁機勵磁系統在通常情況下很難滿足要求。而采用提高勵磁頂值電壓的方法,可以使電壓響應比增大。如圖6-40所示,當勵磁頂值電壓提高時,即Ufdmax2>Ufdmax1,對同一時間t1有Utd2>Ufd1,即勵磁頂值電壓愈高,勵磁電壓上升速度愈快。電壓響應速度得到了改善,但是高勵磁頂值電壓將會危及勵磁機及發電機安全。
為了防止過高強勵電壓損壞發電機轉子絕緣,設置最大勵磁電流瞬時限制,當勵磁電壓達到發電機允許的勵磁頂值電壓倍數時,應由勵磁調節器動作立刻對勵磁進行限制,使勵磁電流限制在Ifdmax。
2.電力系統穩定器(Power System Stabilizer,PSS)
當發電機通過遠距離輸電線與電網連接,而線路傳輸功率又較大時,會出現低頻振蕩,這對維護發電機穩定運行是不利的,因此,投入電力系統穩定器(PSS),增大系統對振蕩的阻尼,可以抑制低頻振蕩。
|
發電機高勵磁頂值電壓與電壓上升速度曲線圖 |
(1)正阻尼力矩與負阻尼力矩
發電機正常運行時,輸入功率等于輸出功率,發電機為額定轉速,δ角不發生變化。如在圖6-15中,發電機穩定運行在α點,δ=δ0不變化。
當發電機受擾動時,如系統電壓降低或升高,則功角特性相應降低或升高,在輸入功率不變情況下,發電機要加速或減速,δ角增大或減小。
發電機轉速變化過程中,發電機系統對這種轉速變化而產生的力矩即阻尼力矩的性質有著重要作用。阻尼力矩有正阻尼力矩和負阻尼力矩。正阻尼力矩作用的方向與轉速變化的方向相反,起阻止(阻尼)轉速變化的作用,即發電機轉速升高超過額定轉速時,正阻尼力矩起制動作用;發電機轉速低于額定轉速時,正阻尼力矩起加速作用。所以正阻尼力矩可使發電機穩定運行,就發電機本身結構而言,水輪發電機轉子上的阻尼繞組、汽輪發電機轉子本身在轉速變化時產生正的阻尼力矩。當然,轉速不發生變化時,不產生阻尼力矩。
負阻尼力矩與正阻尼力矩完全不同,負阻尼力矩作用的方向與轉速變化的方向相同,起推動轉速變化的作用,使之轉速不斷增大,造成發電機失去動態穩定,或引起發電機低頻振蕩,影響系統穩定運行。
(2)AER的負阻尼作用
由于發電機勵磁回路是一個大電感回路,勵磁電壓中存在某一交變分量時,相應于這一交變分量的勵磁電流,其相位應滯后交變分量勵磁電壓90°。另外,機端電壓Uc與功率角δ間的關系為:發電機δ角增大時,機端電壓UG會降低;δ角減小時,機端電壓UG升高。
當發電機受到某種干擾,使轉速增加(減小),即Δωw>0(Δω<0)時,δ增加(減小);機端電壓UG降低(升高);AER測得這一機端電壓變化,基本無延時放大若干倍以增加(減小)勵磁電壓Ufd;相應的勵磁電流Ifd緩慢增加(減小),發電機空氣隙中的磁場相應緩慢增加(減小),以升高(降低)機端電壓,實現機端電壓的調節。
要使發電機動態穩定,必須要有正的阻尼力矩,即必須有與Δω同相位的阻尼力矩。當發電機裝設快速AER時,由于干擾使Δω>0(Δω<0),上述調節過程驅使UG升高(降低),UG升高(降低)引起發電機輸出功率增大(減小),對發電機起制動(增速)作用。
再進一步討論Δω與ΔUG變化間的相位關系。由于Δω變化,必然引起δ角的變化。Δw的相位超前Δδ相位90°。快速AER當機端電壓變化時勵磁電壓瞬時響應,ΔUfd與Δδ同相位。考慮到勵磁回路是一個大電感回路,ΔIfd變化滯后ΔUfd變化90°,即ΔUG的變化滯后ΔUfd變化90°,Δω與ΔUG有反相關系。
ΔUG變化與Δω變化有反相關系,即ΔUG引起的功率變化具有負阻尼力矩性質。也就是說,當Δω>0時,AER調節結果使ΔUG升高產生的制動力矩為負,使發電機進一步增速;當Δω<0時,AER調節結果使ΔUc降低產生的增速力矩為負,使發電機進一步減速。
因此,當AER放大倍數過大,產生的負阻尼作用超過發電機轉子本身的正阻尼作用時,發電機容易失去動態穩定,或引起系統低到0.3Hz的低頻振蕩。
(3)動態失穩的抑制(PSS)
抑制發電機動態失穩最有效的方法是:在AER的輸入回路中引入能反應發電機轉速變化的附加環節,并使機端電壓變化能夠與轉速變化同相位,以達到由AER提供正阻尼力矩的目的。引入AER的這個附加量,可直接取自發電機的轉速,也可取自發電機輸出有功功率變化量ΔP,或者取自機端電壓的頻率。當然,引入AER的這一附加調節量必須經過一定的相位領前回路,使在該系統低頻振蕩頻率下達到機端電壓變化與轉速變化同相位。這一措施稱之為電力系統穩定器(PSS),也可稱附加反饋。
減小AER的放大系數,也可在一定程度上抑制發電機的失穩。在AER中,為提高AER的調節品質,使在外部干擾情況下迫使在平衡點的動態誤差為零,可采用零動態的最優勵磁控制和非線性最優勵磁控制,同時也可提高AER系統的動態阻尼。
三、自動勵磁調節器的其他功能
1.自動勵磁調節器Watchdog 功能
為監視CPU運行,防止受電氣干擾而死鎖或停運,AER設有專門的硬件監視器(Watchdog)。
在控制調節程序返回中斷前,將一個自檢信號送到監視器,以確認CPU工作正常,從而可繼續下一循環工作。若因電氣干擾程序走錯路徑或停止執行,則監視器接收不到自檢信號,系統給出故障信號,AER自動切換到備用通道。在CPU死鎖或停運時,觸發脈沖數據不會被更新,因而CPU死鎖或停運不會導致發電機失磁。
2.數字式電壓給定系統
數字式電壓給定系統,采用軟件給出機端電壓給定值。當以勵磁電流為被調量時給出勵磁電流值,可就地或遠方(主控室)給出給定值,實現升高或降低機端電壓;升、降電壓速度可選擇,以實現電壓平穩調節,不發生跳變。此外,給定電壓值具有上、下限限制,每次停機時給定值自動置零電壓,為下次開機作準備。
數字式電壓給定系統具有很強的抗干擾能力,可避免因受干擾而導致發電機失磁或發生誤強勵。
3.兩個自動控制通道間的切換
大型發電機的AER,通常采用雙自動控制通道以提高運行可靠性。一個自動控制通道工作時,另一個自動控制通道處備用方式。每個自動控制通道有兩種工作方式:
① 以機端電壓為被調量的自動控制通道;
② 以勵磁電流為被調量的手動控制通道。
于是,AER兩個控制通道間的切換可以是自動切換到自動、自動切換到手動、手動切換到自動或手動切換到手動四種切換方式中的一種。AER中的備用工作通道不斷跟蹤工作通道,當工作通道發生故障時自動切換到備用通道工作。
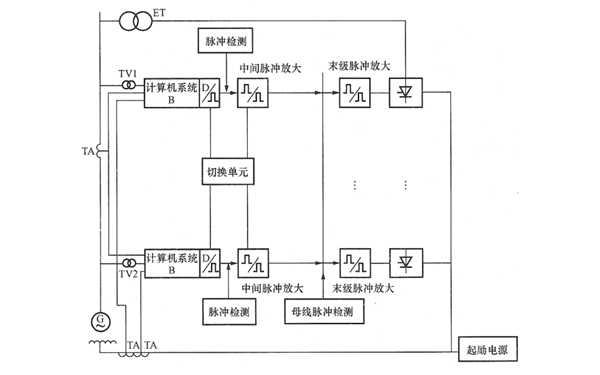
勵磁調節器的雙重化配置原理見圖6-41,包括主控制單元的雙重化、勵磁功率單元的雙重化、勵磁電流測量的雙重化、雙重電源配置及TV的雙重化。
|
發電機勵磁調節器的雙重化配置原理圖 |
4.備用通道對工作通道的自動跟蹤
所謂備用通道對工作通道的自動跟蹤,就是采用高速同步串行通信實現兩個通道的計算機間交換信息,使上述切換不發生電壓波動或無功功率的擺動。考慮到工作通道發生故障時計算的可控整流橋的控制角有問題,所以備用通道跟蹤工作通道3s前的工作狀態。除上述專用功能外,AER還具有與上位計算機通信、在線顯示和修改參數、自檢和自診斷、事件和故障記錄等功能。
----------------
以上信息來源于互聯網行業新聞,特此聲明!
若有違反相關法律或者侵犯版權,請通知我們!
溫馨提示:未經我方許可,請勿隨意轉載信息!
如果希望了解更多有關柴油發電機組技術數據與產品資料,請電話聯系銷售宣傳部門或訪問我們官網:http://www.nkcyfdjpj.cn
- 上一篇:發電機負荷功率與頻率特性
- 下一篇:康明斯柴油發電機的機油進水的危害和原因




